
1. Faça o carregamento do código
#define PINO_BUZZER 8
#define TEMPO 250
void setup() {
pinMode(PINO_BUZZER, OUTPUT);
}
void loop() {
digitalWrite(PINO_BUZZER, HIGH);
delay(TEMPO);
}
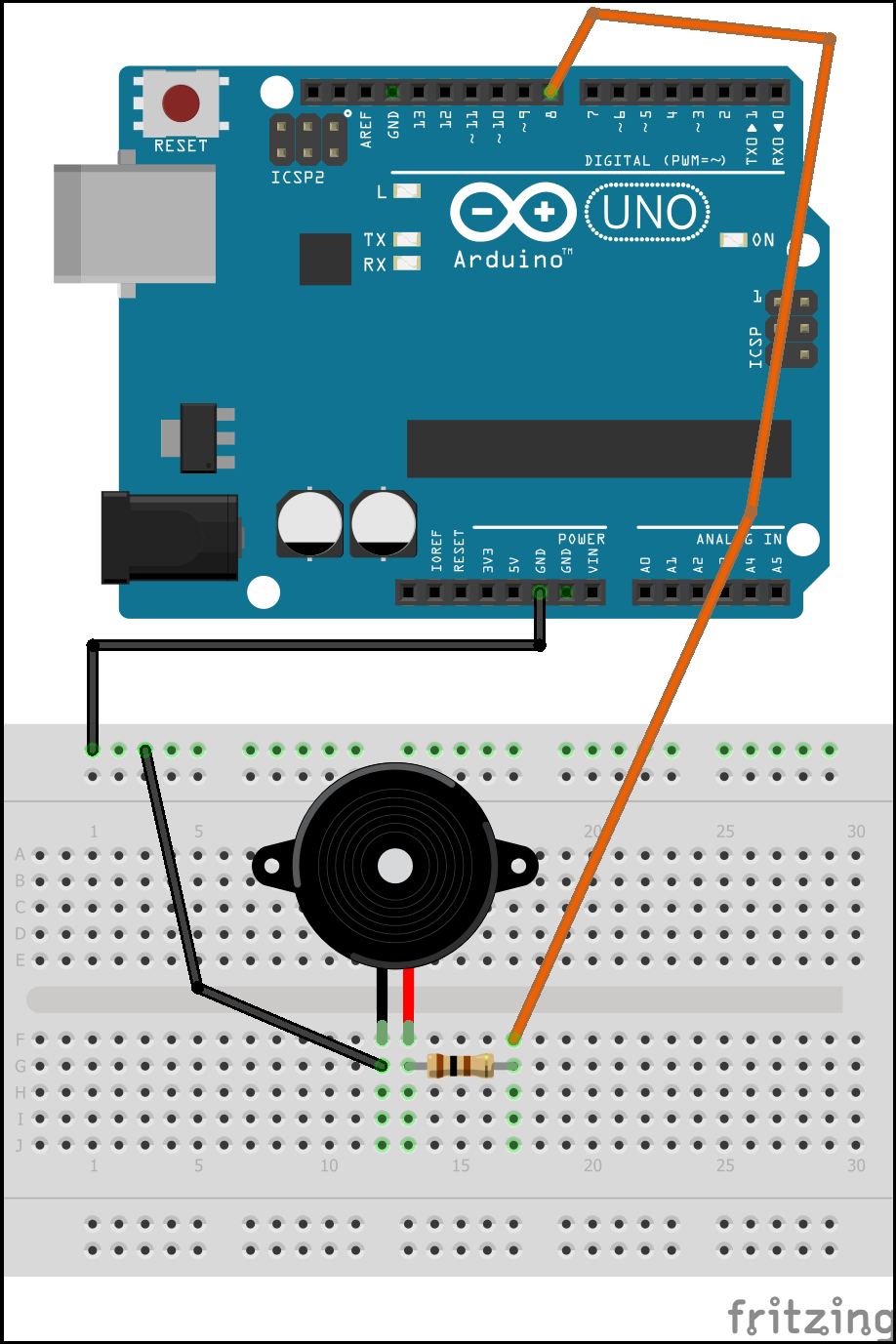
2. Faça a montagem do circuito
3. Faça o carregamento do código
#include <Ultrasonic.h>
#define PINO_TRIG 4
#define PINO_ECHO 5
#define TEMPO 250
Ultrasonic ultrasonic(PINO_TRIG, PINO_ECHO);
void setup(){
Serial.begin(9600);
}
void loop(){
float cm;
long ms = ultrasonic.timing();
cm = ultrasonic.convert(ms, Ultrasonic::CM);
Serial.print("cm: ");
Serial.println(cm);
delay(TEMPO);
}
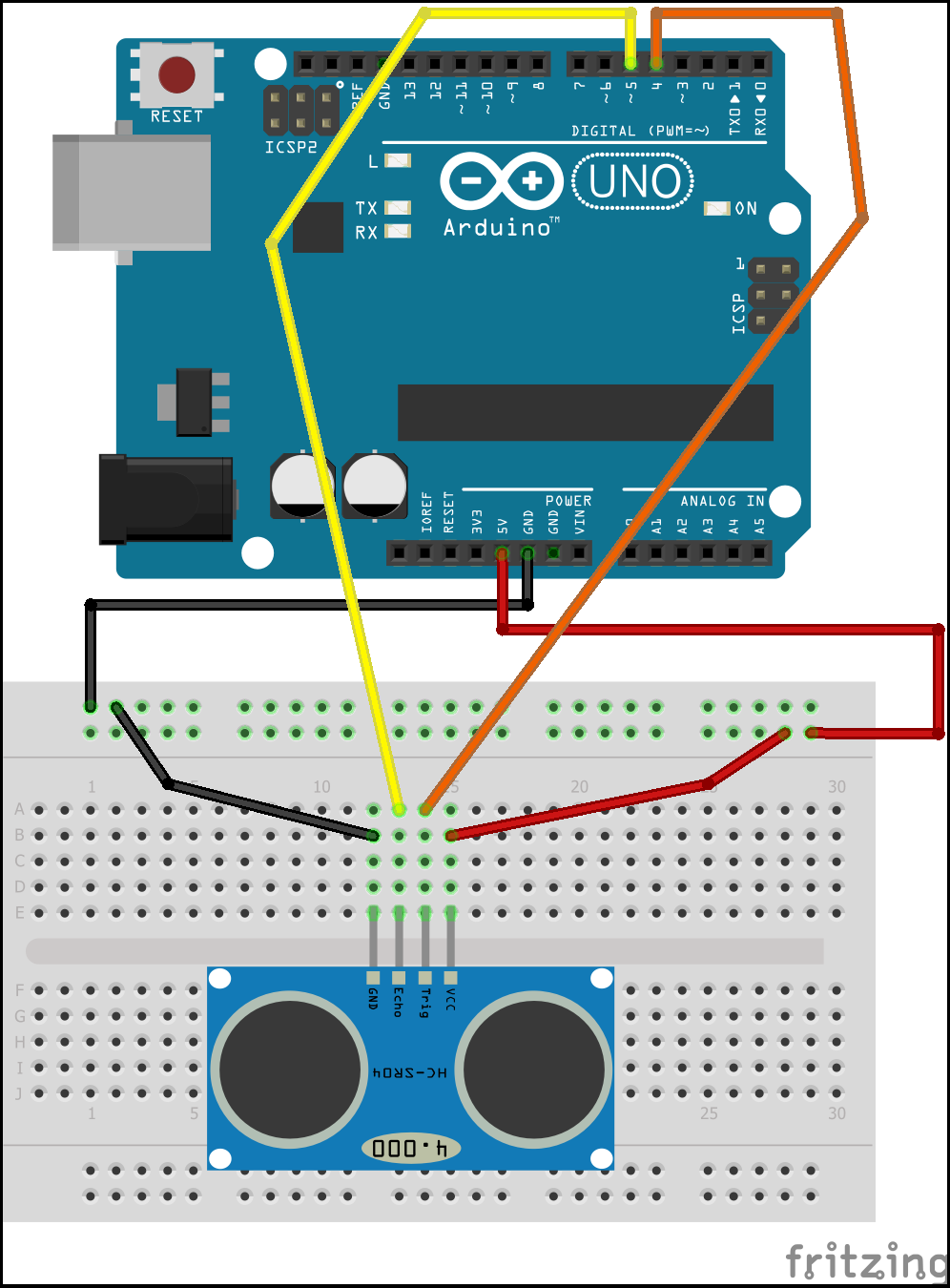
4. Faça a montagem do circuito
5. Faça o carregamento do código
#include <Ultrasonic.h>
#define PINO_TRIG 4
#define PINO_ECHO 5
Ultrasonic ultrasonic(PINO_TRIG, PINO_ECHO);
#define PINO_BUZZER 8
#define TEMPO 250
void setup(){
pinMode(PINO_BUZZER, OUTPUT);
Serial.begin(9600);
}
void loop(){
float cm;
long ms = ultrasonic.timing();
cm = ultrasonic.convert(ms, Ultrasonic::CM);
if(cm >= 0 && cm <= 40){
digitalWrite(PINO_BUZZER, HIGH);
}else{
digitalWrite(PINO_BUZZER, LOW);
}
delay(TEMPO);
}
6. Monte os circuitos dos passos 2 e 4 no mesmo Arduino/protoboard
Seja feliz.